
Onderzoekers van de Amerikaanse Standford Universiteit ontwikkelden een systeem waarmee ze via een laser en lichtsensor een beeld vormen van een object achter een ondoorzichtige wand. Zelfrijdende auto’s zien hiermee in de toekomst wellicht wel het verkeer ‘om de hoek’ aankomen.
Hebben we allemaal niet eens gewenst dwars door muren heen te kunnen kijken? Amerikaanse wetenschappers krijgen dit kunstje nu voor elkaar met een lasersysteem. Ze vormen hiermee een accuraat beeld van verschillende objecten die zich achter een muur bevinden, zoals bijvoorbeeld een beeldje van een konijn. Het systeem maakt handig gebruik van het licht dat de objecten reflecteren.

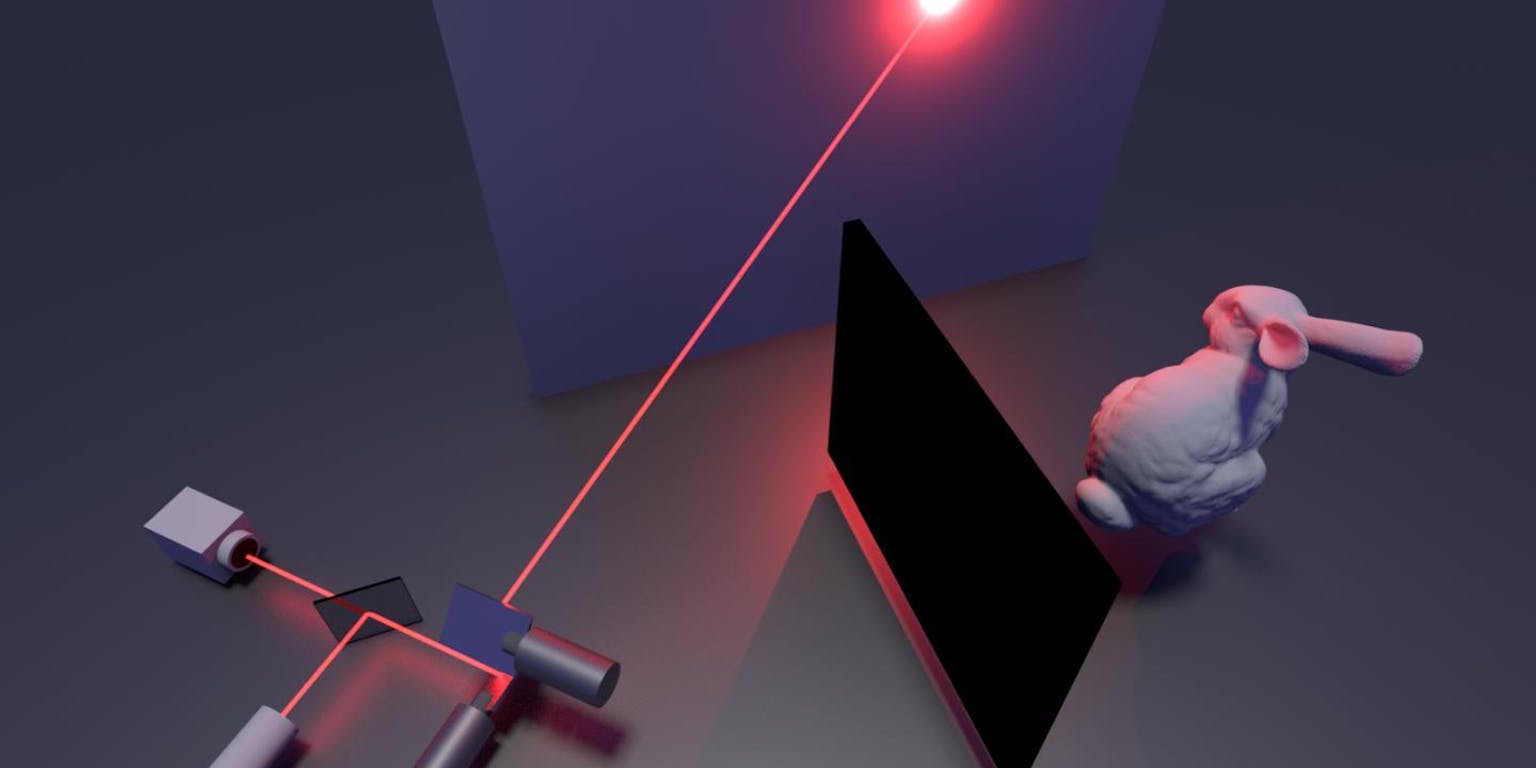
Impressie van de opstelling.
Stanford Computational Imaging LabHet systeem bestaat uit een beweegbare laser en een gevoelige sensor die de lichtintensiteit op een bepaald punt bepaalt. De wetenschappers gebruiken een wand of ondoorzichtig doek om een object te verhullen voor hun meetsysteem. Met laserlicht dat via een tweede muur op het object valt, én weer via diezelfde muur terugkaatst naar het lasersysteem vormt een computer een beeld.
Er zijn al lasersystemen (ook wel LIDAR genoemd) die een omgeving in kaart brengen met direct gereflecteerd licht van objecten. Deze moeten zich dan in het zicht van de LIDAR bevinden. Dat laatste hoeft dus niet bij de vinding uit Standford, die informatie haalt uit het licht dat door (niet-spiegelende) oppervlaktes alle kanten op wordt gereflecteerd. De wetenschappers denken overigens wel dat ze bestaande LIDAR-systemen kunnen aanpassen zodat ze uiteindelijk met hun techniek ook om de hoek kunnen kijken. Het onderzoek is deze week in het wetenschappelijke tijdschrift Nature gepubliceerd.
Om de hoek
Er zijn al verschillende (experimentele) systemen ontwikkeld die via een muur om een hoekje kunnen spieken. Een mooie techniek, maar de signalen zijn vaak zwak, waardoor het verzamelen van informatie meestal lang duurt. Bovendien duurt het nog veel langer om met een computer het beeld te reconstrueren uit de beperkte informatie.

Veel zelfrijdende auto’s, zoals dit exemplaar van Google, zijn op het dak uitgerust met LIDAR om de omgeving in kaart te brengen.
Flickr, Steve Jurvetson via CC BY 2.0Het nu gepresenteerde systeem werkt sneller dan eerdere methodes. Het verzamelt informatie over het verborgen object door met de beweegbare laser een lichtpunt te creëren op de (tweede) muur. Dat gebeurt met korte lichtpulsen van slechts tientallen picoseconden (een picoseconde is 0,000.000.000.001 seconde). Vanaf dit punt op de muur valt een deel van het licht op het verborgen object, dat weer een kleine fractie van het licht terugkaatst dat op de muur valt. Door minutieus naar de timing van het licht op de muur te kijken, kan een lichtsensor bepalen hoe ver het licht heeft gereisd en bepalen hoe ver weg het verborgen object is.
De onderzoekers van Standford passen vervolgens een aantal slimme trucs toe om sneller een beeld te vormen. Zo gebruiken ze de beweegbare laser om de meting voor een groot aantal punten op de muur te doen. Een gemiddelde scan bestaat uit enkele duizenden punten, verdeeld over een oppervlak van ruwweg een meter bij een meter. Ook al duurt het opnemen van één punt niet zo lang, alle punten meten kan altijd nog tussen de twee minuten en een uur duren.
Juist op het gebied van beeldbewerking wint het nieuwe systeem veel tijd ten opzichte van eerdere systemen. Zelfs op een laptop duurt de informatieverwerking pakweg een seconde. “We hebben een manier gevonden om relatief snel een inschatting te maken van hoe het verborgen object er ruwweg uitziet”, laat hoofdonderzoeker Matthew O’Toole per mail weten. “Dat is essentieel, want daarna kunnen we er al bestaande en efficiënte algoritmes op loslaten die het beeld scherper maken.”
De wetenschappers lieten zien dat ze accurate beelden konden vormen van een konijnenbeeldje, een pop en een ‘Exit’-bord (inclusief de tekst op dat bord). Wanneer het object zelf reflecterend is, zoals een verkeersbord, dan werkt het systeem volgens de onderzoekers nog beter.
In de echte wereld
Wat is nu de kans dat we deze techniek ook buiten het gecontroleerde laboratorium gaan terugvinden? Werkt het ook in een wereld met sterk wisselende lichtomstandigheden en oneindig veel verschillende reflectieve eigenschappen van oppervlaktes? De onderzoekers laten zien dat het systeem ook buiten (in de zon) werkt. “Onze aanpak lijkt redelijk robuust. Het werkt bijvoorbeeld ook bij een muur met een wisselend oppervlak, zonder dat we het algoritme aanpasten”, zegt O’Toole.
Het mooie is dat je de eerder genoemde bestaande LIDAR-systemen wellicht uit kunt rusten met dergelijke algoritmes. Ook dat probeerden de wetenschappers al, maar ze laten weten dat er nog werk te doen is voordat deze systemen ook om de hoek kijken.
Video (in het Engels) waarin de techniek wordt gedemonstreerd.
'%20fill='%23000'%3e%3cpath%20d='M1.28%2022.5c-.505%200-.826-.018-.862-.018a.44.44%200%2001-.238-.792l2.425-1.778A8.266%208.266%200%2001.326%2014.22c0-4.559%203.71-8.268%208.268-8.268a8.269%208.269%200%20018.087%206.556c.119.559.176%201.135.176%201.716%200%204.554-3.705%208.263-8.263%208.263-.907%200-1.804-.15-2.667-.44-1.782.392-3.608.458-4.646.458V22.5zM8.595%206.83c-4.075%200-7.388%203.313-7.388%207.388%200%202.055.867%204.03%202.376%205.416.097.088.15.216.14.348a.448.448%200%2001-.18.33L1.774%2021.61c1.06-.022%202.609-.119%204.083-.458a.468.468%200%2001.246.013%207.414%207.414%200%20002.49.432c4.07%200%207.384-3.314%207.384-7.384a7.385%207.385%200%2000-6.41-7.322%207.849%207.849%200%2000-.973-.06z'/%3e%3cpath%20d='M20.944%2013.102c-.775%200-2.139-.049-3.48-.34-.37.124-.758.216-1.154.27a.44.44%200%2001-.492-.344%207.395%207.395%200%2000-6.253-5.795.44.44%200%2001-.383-.462A6.287%206.287%200%200115.462.5c3.334%200%206.296%202.825%206.296%206.296%200%201.571-.594%203.09-1.65%204.242l1.711%201.254a.439.439%200%2001-.238.792c-.03%200-.263.013-.637.013v.005zm-3.507-1.237c.03%200%20.066%200%20.097.009.941.216%201.918.3%202.675.33l-1.034-.761a.448.448%200%2001-.18-.33.431.431%200%2001.14-.348%205.412%205.412%200%20001.743-3.969A5.421%205.421%200%200015.46%201.38a5.407%205.407%200%2000-5.363%204.708%208.275%208.275%200%20016.48%206.002c.243-.053.48-.12.71-.198a.428.428%200%2001.149-.027z'/%3e%3c/g%3e%3cdefs%3e%3cclipPath%20id='prefix__clip0_1886_150885'%3e%3cpath%20fill='%23fff'%20transform='translate(0%20.5)'%20d='M0%200h22v22H0z'/%3e%3c/clipPath%3e%3c/defs%3e%3c/svg%3e) Reageer
Reageer