
In sciencefiction komen ze al voor, robotjes die ons lichaam tot in de kleinste hoekjes verkennen, medicijnen afleveren, en micro-operaties doen. Wetenschappers in Duitsland denken dat ze nu een stapje dichterbij zijn met op afstand bestuurbare, millimeter grote robots die kunnen lopen, zwemmen en springen.
Ze hebben wel wat weg van minuscule huppelende zwarte matrasjes en ze zijn slechts anderhalf bij vier millimeter groot. Als vreemde levende wezentjes kruipen ze behendig door een buisje, springen over een obstakel, lopen naar een object, krullen eromheen en rollen ermee weg.

Deze veelzijdige ‘microrobots’ in actie.
Max Planck Institute for Intelligent Systems
Een van de robots, naast een euromunt van twee cent.
Hu W. et al./Max Planck Institute for Intelligent SystemsDeze ‘wezentjes’ zijn morsdood, maar worden tot leven gewekt met een magneetveld van Duitse wetenschappers van het Max Planck Institute for Intelligent Systems in Stuttgart. Zo functioneren ze als kleine robotjes. Door de sterkte en de richting van het magneetveld aan te passen, laten de onderzoekers zien dat ze controle hebben over de robotjes, die gemaakt zijn van een rubberachtig flexibel materiaal.
Volgens de wetenschappers kunnen hun zachte robots straks misschien wel ingezet worden voor ‘onderhoud’ in het lichaam, het doen van minuscule operaties of het afleveren van medicijnen. Het onderzoek is deze week in het wetenschappelijke tijdschrift Nature gepubliceerd.
Kruipen als een rups, zwemmen als een kwal
De zorgvuldige choreografie is mogelijk door relatief zwakke magneetvelden waaraan Wenqi Hu en zijn collega-onderzoekers de robots blootstellen. Een veldsterkte van vijf tot pakweg twintig microtesla, in de orde van grootte van een koelkastmagneet, is genoeg om de robots te laten lopen als een rups, kronkelen als een slang of zwemmen als een kwal.
Demonstratie van de verschillende bewegingen van de minirobots.
Om magnetische controle over de robotjes te krijgen, moeten de robotjes zelf magnetisch zijn. Hiervoor stoppen de wetenschappers kleine magnetische deeltjes (van ongeveer vijf micrometer groot) in het materiaal, om ze vervolgens in een bepaalde richting een magnetisch veld mee te geven. Essentieel is dat dit magneetveld op verschillende punten van richting verschilt, waardoor de robot in een bepaalde vorm te drukken is onder invloed van een extern magnetische veld.
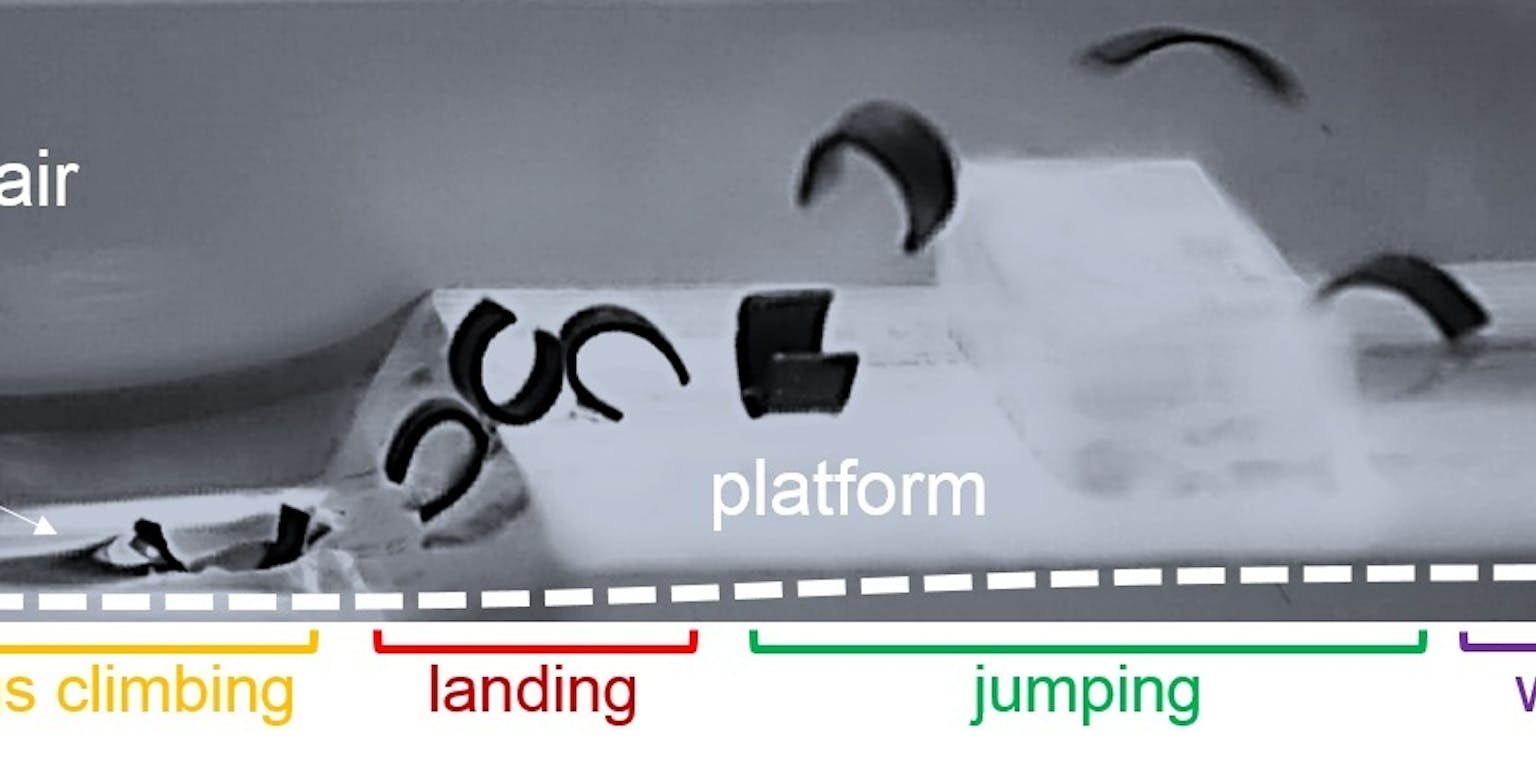
Onder de invloed van dat externe magnetische veld, vouwen de robotjes in elkaar. Gaat het magnetisch veld uit, dan gaan de robots weer terug naar hun oorspronkelijke vorm. Door hier op een slimme manier mee te spelen – de wetenschappers kunnen het magnetisch veld naar believen draaien, sterker of zwakker maken – zijn de robots in staat om te rollen of te springen.
De wetenschappers zijn trots op het feit dat hun robots verschillende obstakels nemen. Ze springen over een verhoging of kuil, kruipen uit het water (op die schaal niet zo makkelijk), en lopen of rollen over ruwe en gladde oppervlakten. Ook kunnen ze in een cirkel lopen. Als klap op de vuurpijl kunnen de robots een object zoals een stukje nylon van ongeveer een millimeter groot oppakken en verplaatsen, door er omheen te krullen en ermee weg te rollen.
Miniaturiseren
Bas Overvelde werkt bij onderzoeksinstituut AMOLF in Amsterdam aan ‘zachte robots’ en is te spreken over het onderzoek. “Wetenschappers stoppen veel energie in robots die met magnetische velden of licht bestuurbaar zijn, maar de meeste robots kunnen maar één beweging maken”, zegt hij. “Deze robots hebben een heel scala aan bewegingen onder de knie.”

De wetenschappers vergelijken de beweging van de zachte robotjes met verschillende dieren. Zo kunnen ze ‘kruipen’ als een rups.
Chung Yun TakOvervelde ziet het best voor zich dat je dergelijke robotjes – als ze klein genoeg zijn – kunt inzetten in het lichaam om bijvoorbeeld iets af te leveren. “Het is wel de vraag met welke precisie je zo’n proces kan controleren,” zegt hij, “het is zachte robotica en in een complexe omgeving is het lastig voorspellen wat er gebeurt. Maar misschien hoeft het ook niet zo heel precies te zijn, om functioneel te zijn.”
De wetenschappers uit Duitsland willen hun robots nu testen op verschillende complexe oppervlaktes en in vloeistoffen. Verder willen ze de robots nog kleiner maken – kleiner dan een millimeter – om hun potentie in medische toepassingen te bepalen. Dat zal ongetwijfeld weer nieuwe uitdagingen opleveren. “Robotische systemen die wij ontwikkelen zijn veel groter, maar over het algemeen kun je er niet vanuit gaan dat een systeem nog steeds even goed werkt als je het sterk miniaturiseert”, zegt Overvelde. “Het krachtenspel in een vloeistof is op iedere schaal weer volledig anders.”
'%20fill='%23000'%3e%3cpath%20d='M1.28%2022.5c-.505%200-.826-.018-.862-.018a.44.44%200%2001-.238-.792l2.425-1.778A8.266%208.266%200%2001.326%2014.22c0-4.559%203.71-8.268%208.268-8.268a8.269%208.269%200%20018.087%206.556c.119.559.176%201.135.176%201.716%200%204.554-3.705%208.263-8.263%208.263-.907%200-1.804-.15-2.667-.44-1.782.392-3.608.458-4.646.458V22.5zM8.595%206.83c-4.075%200-7.388%203.313-7.388%207.388%200%202.055.867%204.03%202.376%205.416.097.088.15.216.14.348a.448.448%200%2001-.18.33L1.774%2021.61c1.06-.022%202.609-.119%204.083-.458a.468.468%200%2001.246.013%207.414%207.414%200%20002.49.432c4.07%200%207.384-3.314%207.384-7.384a7.385%207.385%200%2000-6.41-7.322%207.849%207.849%200%2000-.973-.06z'/%3e%3cpath%20d='M20.944%2013.102c-.775%200-2.139-.049-3.48-.34-.37.124-.758.216-1.154.27a.44.44%200%2001-.492-.344%207.395%207.395%200%2000-6.253-5.795.44.44%200%2001-.383-.462A6.287%206.287%200%200115.462.5c3.334%200%206.296%202.825%206.296%206.296%200%201.571-.594%203.09-1.65%204.242l1.711%201.254a.439.439%200%2001-.238.792c-.03%200-.263.013-.637.013v.005zm-3.507-1.237c.03%200%20.066%200%20.097.009.941.216%201.918.3%202.675.33l-1.034-.761a.448.448%200%2001-.18-.33.431.431%200%2001.14-.348%205.412%205.412%200%20001.743-3.969A5.421%205.421%200%200015.46%201.38a5.407%205.407%200%2000-5.363%204.708%208.275%208.275%200%20016.48%206.002c.243-.053.48-.12.71-.198a.428.428%200%2001.149-.027z'/%3e%3c/g%3e%3cdefs%3e%3cclipPath%20id='prefix__clip0_1886_150885'%3e%3cpath%20fill='%23fff'%20transform='translate(0%20.5)'%20d='M0%200h22v22H0z'/%3e%3c/clipPath%3e%3c/defs%3e%3c/svg%3e) Reageer
Reageer